 丂丂
丂丂
丂怣崋張棟偵尦偺僨乕僞偵廳傒偯偗傪偟偰懌偟崌傢偣偰偄偔偲偄偆丄僼傿儖僞傪妡偗傞曽朄偑偁傞丅
偙傟偼慜愡偱愢柧偟偨傛偆偵扨弮偵儮倶傪摦偐偟側偑傜僂傿儞僪僂暆暘懌偟崌傢偣偰偄偔偺偲偼彮偟堎側傞丅
偙偙偱偺峫偊曽偼僼傿儖僞乕娭悢倖乮倶乯偲偄偆傕偺傪梡堄偟偰丄
俥倝倢倲倕倰倕倓丵倷乮倶乯亖儼Data乮倶亄値儮倶乯亊倖乮値儮倶乯
偲偄偆廳傒娭悢乮僼傿儖僞乕娭悢乯傪峫偊傞丅偙偺幃偼堏摦暯嬒偺傛偆偵Data乮倶+値儮倶乯傪懌偟崌傢偣偰偄偔偺偱偼側偔
廳傒娭悢傪偐偗偰偄傞揰偵摿挜偑偁傞丅偱偼嬶懱揑偵傒偰偄偙偆丅
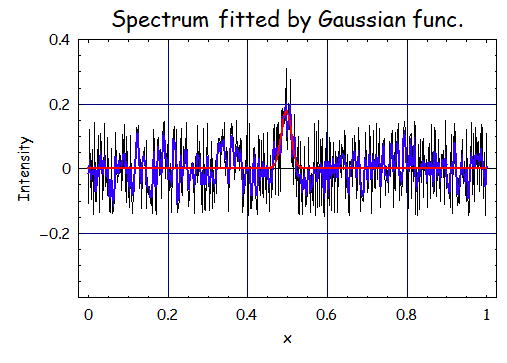
傑偢丄尦僨乕僞偲偟偰僈僂僗娭悢偺僨乕僞傪崱傑偱偲摨條偵梡堄偡傞丅僈僂僗娭悢偲偼丄
偲偄偆娭悢偱偁傝丄埲壓偺椺偱偼丄A亖0.俀丆倣亖侽丏俆丄冃亖侽丏侽侾偱丄偦傟傪儮倶亖0.00俀僺僢僠偱怳暆儮倷亖丂-0.15乣0.15
偺儔儞僟儉僲僀僘傪晅壛偟偰惗惉偟偨僈僂僗娭悢偵曧偆僨乕僞傪惗惉偡傞丅
師偵偝傜偵丄僈僂僗僼傿儖僞偱丄A亖1/併乮俀兾冃乯丄倣亖0丄冃亖乮壜曄乯偺僼傿儖僞娭悢倖乮倶乯偺僈僂僗娭悢偺僼傿儖僞傪梡偄傞丅
偦偟偰丄偦偺僨乕僞傪僈僂僗娭悢偱僼傿僢僩偡傞偙偲傪峫偊偰丄廫暘偵尦偺A,m,冃偵嬤偄僷儔乕儊乕僞傪帩偮
僈僂僗娭悢偲側傞偐傪妋擣偡傞丅
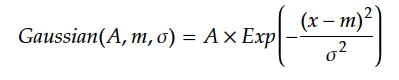
侾丏僈僂僗僼傿儖僞偺冃亖俆偺偲偒
偱丄僼傿僢僥傿儞僌偺寢壥偼丄A亖0.19丄倣亖0.50丄冃亖0.017偱偁傞丅
偙傟傪尒偰傞偲Gaussian僼傿儖僞傪偐偗傞偙偲偵傛偭偰摼傜傟傞怣崋乮惵慄乯偼丄僲僀僘惉暘偑掅尭偝傟偰偄傞丅
堦曽偱塀傟偰偄偨僈僂僗怣崋偲僲僀僘偺怣崋偲傪幆暿偡傞偺偼擄偟偄丅倶亖0.5埲奜偺応強偱傕怣崋偑偁傞傛偆偵尒偊傞丅
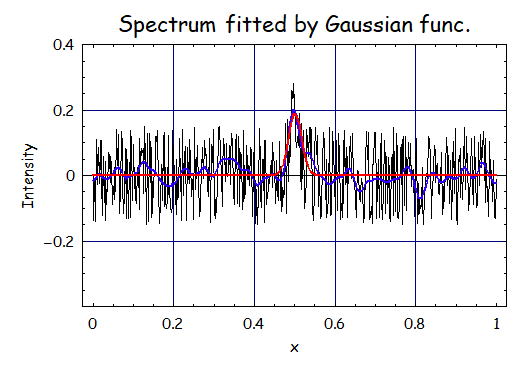
俀丏僈僂僗僼傿儖僞偺冃亖2.5偺偲偒
偱丄僼傿僢僥傿儞僌偺寢壥偼丄A亖0.15丄倣亖0.50丄冃亖0.019偱偁傞丅
僼傿儖僞偺僈僂僗偺冃傪彫偝偔偡傞偲尦怣崋偺冃偺暆偲僼傿儖僞偱偐偗偰僲僀僘偺峀偑傝偑摨掱搙偵側偭偰偄傞偺偑
尒偰庢傟傞丅備偊偵僈僂僗怣崋偲僲僀僘偵僼傿儖僞傪偐偗偨屻偺僲僀僘偺僗儁僋僩儖暆偑偐側傝摨掱搙偵側偭偰偄傞丅
寢壥偲偟偰擇偮偺怣崋偺嬫暿偑偮偒偯傜偄偺偑傢偐傞丅
帠幚丄偙偺僼傿儖僞偺冃偑2.5偺帪偼僈僂僗僼傿僢僥傿儞僌偺寢壥傕埨掕偟側偐偭偨丅
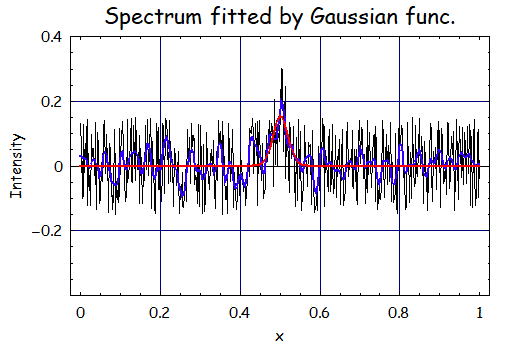
俁丏僈僂僗僼傿儖僞偺冃亖1偺偲偒
偱丄僼傿僢僥傿儞僌偺寢壥偼丄A亖0.18丄倣亖0.50丄冃亖0.013偱偁傞丅
僼傿儖僞傪偐偗偨屻丄崱夞偺僈僂僗僼傿儖僞偺冃偺暆偼嫹偄偺偱崅廃攇惉暘偟偐暯妸壔偝傟偰偄側偄丅
偙偺傛偆偵尒偰偒偨傛偆偵丄僈僂僗僼傿儖僞偺冃傪曄峏偡傞偙偲偱偳偺偔傜偄偺廃攇悢傑偱偺僲僀僘傪暯妸壔偟偨偄偐
傪僐儞僩儘乕儖偡傞偙偲偑弌棃傞丅