 丂丂
丂丂
丂怣崋張棟偵堏摦暯嬒乮Moving Average乯偲偄偆峫偊曽偑偁傞丅
堏摦暯嬒偼倶曽岦偵儮倶摦偐偟側偑傜倷僨乕僞傪懌偟偰偄偔丅嬶懱揑偵偼丄儮倶傪10夞暘摦偐偟偰懌偡応崌丄
倷乮倶乯丄倷乮倶+儮倶乯丄丄丄丄丄倷乮倶+10儮倶乯偺慡偰偺榓傪庢傝10偱妱傞偙偲傪峴偆丅
崱夞偼偦偺忬懺傪妋擣偡傞偵摉偨偭偰丄僈僂僗娭悢偵僲僀僘傪壛偊偰丄堏摦暯嬒偺岠壥傪尒偰偄偔偙偲偵偡傞丅
僈僂僗娭悢偲偼丄
偲偄偆娭悢偱偁傝丄埲壓偺椺偱偼丄A亖0.1丆倣亖5丄冃亖1.1偱丄偦傟傪儮倶亖0.01僺僢僠偱怳暆儮倷亖丂-0.5乣0.5
偺儔儞僟儉僲僀僘傪晅壛偟偰惗惉偟偨僈僂僗娭悢偵曧偆僨乕僞傪惗惉偡傞丅
偦偟偰丄偦偺僨乕僞傪僈僂僗娭悢偱僼傿僢僩偡傞偙偲傪峫偊偰丄廫暘偵尦偺A,m,冃偵嬤偄僷儔乕儊乕僞傪帩偮
僈僂僗娭悢偲側傞偐傪妋擣偡傞丅
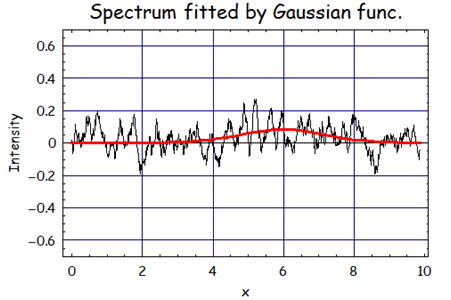
侾丏堏摦暯嬒偑侾丄偮傑傝壗傕堏摦暯嬒偟側偄応崌
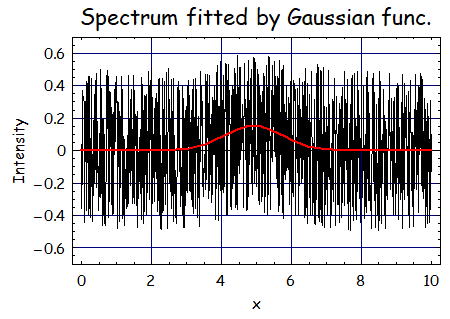
偱丄僼傿僢僥傿儞僌偺寢壥偼丄A亖0.15丄倣亖4.91丄冃亖0.83偱偁傞丅
偙偺応崌丄僨乕僞傪傒傞偲敄偭偡傜僈僂僗偺僺乕僋偑偁傞傛偆偵巚偆偑柧椖偵偼尒偊側偄丅
偟偐偟側偑傜丄僼傿僢僥傿儞僌偟偨寢壥丄僲僀僘偵怣崋偑杽傕傟偰偄偰傕
尦偺僈僂僗僷儔儊乕僞偲奣偹摨掱搙偺僈僂僗娭悢偺僷儔儊乕僞偑摼傜傟偰偄傞偙偲偑暘偐傞丅
俀丏堏摦暯嬒偑俆偱偁傞応崌
偱丄僼傿僢僥傿儞僌偺寢壥偼丄A亖0.076丄倣亖4.52丄冃亖1.46偱偁傞丅
堏摦暯嬒偟偰僲僀僘偺検偼偐側傝尭偭偨偑丄僨乕僞揰悢傕摨帪偵尭傜偟偰偄傞堊丄
怣崋偑偁傞傛偆偵尒偊側偔側偭偰偄傞丅
偦偺堊堏摦暯嬒偡傞慜偲斾妑偟偰傛傝怣崋偑僲僀僘偵杽傕傟偰偄傞傛偆偵尒偊傞丅
幚嵺偺僷儔儊乕僞傕愭傎偳偲斾妑偟偰怳暆偑尭傝丄拞怱埵抲傗暆傕杮棃偺抣偐傜偼偢傟偰偄傞丅
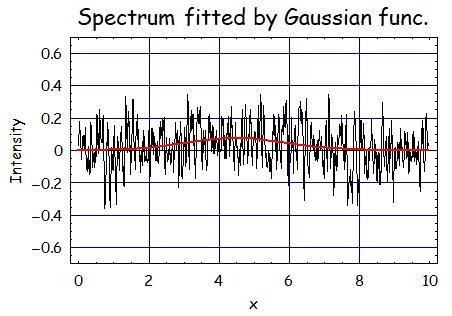
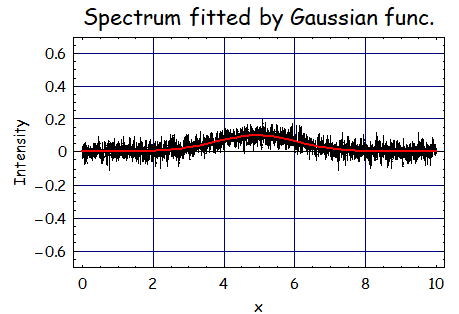
俁丏堏摦暯嬒偑侾俆偱偁傞応崌
偱丄僼傿僢僥傿儞僌偺寢壥偼丄A亖0.129丄倣亖4.98丄冃亖1.08偱偁傞丅
崱夞偺寢壥偼僲僀僘偺検傕偝傜偵尭傝丄摨帪偵僨乕僞揰悢傕尭偭偰偄傞偑怣崋偑偁傞傛偆偵尒偊傞丅
嵞搙寁嶼傪夞偟偨寢壥偑塃偵側傞丅僨乕僞揰悢偑彮側偄偨傔偵暯嬒壔屻僺乕僋偺埵抲偑塃偵婑偭偰偄傞丅
偦偺堊偵丄A亖0.08292丄倣亖5.99丄冃亖1.178偲側傝丄摿偵僺乕僋埵抲偺偢傟偑戝偒偄偙偲偑暘偐傞丅
偙傟傪夞旔偡傞偨傔偵偼偳偆偡傟偽偄偄偐偲偄偆偲丄扨弮偵僨乕僞揰悢傪憹傗偡偙偲偵偁傞丅
係丏堏摦暯嬒偑侾俆偱丄尦偺僨乕僞揰悢偵懳偟偰15攞偺僨乕僞揰悢偵偟偨応崌
偱丄僼傿僢僥傿儞僌偺寢壥偼丄A亖0.0994丄倣亖4.92丄冃亖1.16偱偁傞丅
堏摦暯嬒偑侾俆偱偁傞偵傕偐偐傢傜偢丄僨乕僞揰悢偑廫暘偵懡偄偨傔偐側傝尦偺娭悢偺僷儔儊乕僞偲嬤偄
僼傿僢僥傿儞僌寢壥偵側偭偨偲巚偆丅僼傿僢僥傿儞僌偡傞偵偼廫暘側僨乕僞傪梡偄偰僼傿僢僥傿儞僌偡傞偺偑椙偄丅
偱偼揰悢傪尭傜偝側偄傛偆偵堏摦暯嬒偡傞偵偼偳偆偡傟偽偄偄偺偐丅
摎偊偼扨弮偱丄僨乕僞揰悢傪娫堷偐側偄偱堏摦暯嬒偡傞偙偲偑廳梫偱偁傞丅
偱偼堏摦暯嬒偟偨嵺偵僨儊儕僢僩偼敪惗偟側偄偺偐丠埲壓偺椺傪尒偰傒傛偆丅
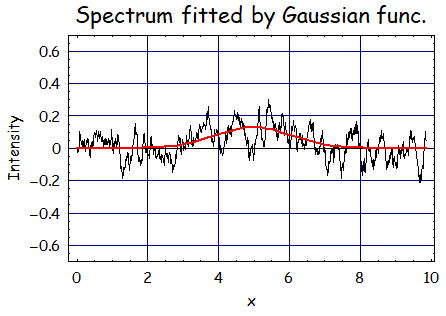
俆丏堏摦暯嬒偑侾侽侽偺応崌
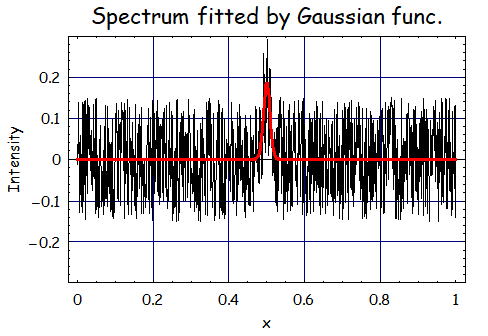
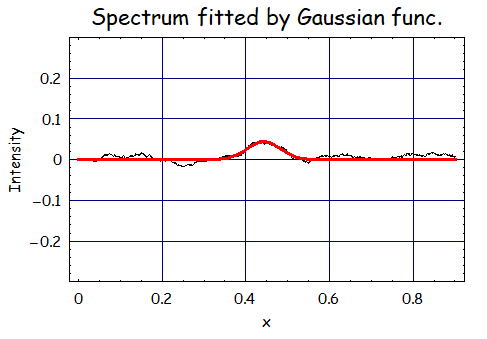
崱夞偼儔儞僟儉僲僀僘傪儮倷亖亇0.15壛偊偰丄A亖0.15丄倣亖0.5丄冃亖0.01偺傛偆側塻偄僺乕僋偺応崌丄
堏摦暯嬒偡傞偲偳偺傛偆側寢壥偵側傞偺偐尒偰傒傛偆丅嵍偺僌儔僼偼堏摦暯嬒側偟偺応崌偱偁傞丅
僼傿僢僥傿儞僌偺寢壥偼丄A亖0.19丄倣亖0.5丄冃亖0.0088偱偁傞丅
偐側傝寢壥偲偟偰偼尦偺僨乕僞偵嬤偄抣偵側偭偰偄傞丅
堦曽偱堏摦暯嬒偟偨応崌丄僼傿僢僥傿儞僌偺寢壥偼丄A亖0.044丄倣亖0.44丄冃亖0.039偱偁傞丅
僲僀僘偼偐側傝掅尭偝傟偰偄傞堊僺乕僋傕尒傗偡偔側偭偰偄傞偑丄怣崋帺懱偑僽儘乕僪偵側偭偰偄傞丅
偙偺傛偆偵堏摦暯嬒傪峴偆偙偲偱怣崋偑僽儘乕僪偵側傞偨傔怣崋偺宍忬傪夝愅偡傞嵺偵偼旕忢偵拲堄偑昁梫偲側傞丅
偮傑傝杮棃偺僺乕僋偲偼堎側傞堊拲堄偑昁梫偲偄偆偙偲偱偁傞丅
堏摦暯嬒僲僀僘傪尭傜偟側偑傜僺乕僋偺嵟戝抣傪尭傜偝側偄暯妸壔曽朄偼側偄偺偐師愡峫偊偰傒傛偆