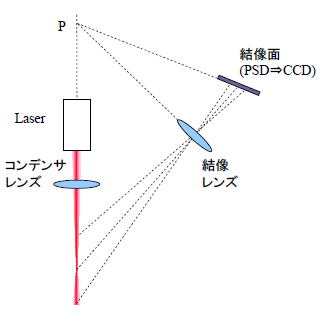
この方式はレーザ変位計の応用である方式で、三角測量の考え方を用いたものである。下の図が三角測量変位計を表した図で、物体が光軸方向に変位量xだけ移動すれば、結像面においてスポットの位置がyだけ変位する。よって、結像面でのスポットの変位から実際の光軸方向での高さの変位xを知ることができる。しかしながら、xとyとの間は単純な線形の関係にはない。
最近では、結像面での位置検出素子としてPSD(position sensitive detector)ではなく、CCD(charge coupled device)を利用することが増えてきている。光軸上の光点が移動しても結像面上でシャープに結像するにはシャインプルーフ条件を満たすように光学系を組む必要がある。
シャインプルーク条件とは、物面と結像レンズ主面が互いに平行でないときに結像面で像がシャープに結像するための条件であり、下の図に示すように結像レンズと結像面とが光軸上の1点Pで交わるように配置されたときに像は結像面上でシャープに結像される。
三角測量方式では、測定に方向性があるそのために下の図に示したように光軸に対して測定面がどの方向に傾斜しているかにより測定面からの拡散光の強度分布に指向性がでる。
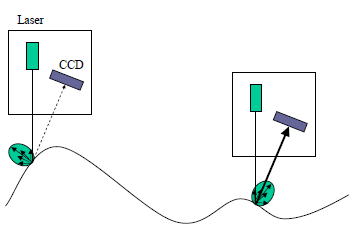
このような指向性の影響を防ぐために、
1).プローブの傾きを変える
2).光学系の工夫(製品例としてWIZ probe(イスラエル) や Wolf and Beck(ドイツ))
最後に三角測量でのスペックに関してまとめる。
| WIZprobe | Metris LC 50 probe | |
|---|---|---|
| 作動距離 | 50mm | 100mm |
| 繰り返し精度(σ) | 6μm | 15μm |
| データ取り込み速度 | 50点/秒 | 19200点/秒 |
| ビーム寸法 | 30μm(スポット) | 50mm(ライン幅) |
| 分解能 | N.A. | 25μm |
Metris LC 50 probe(ベルギー)(Nikon group)はスポット測定ではなくライン上にレーザ光を照射することで、高速にデータを収集することが可能で、今まで数時間から数十時間接触式でかかっていた自動車の部品等を数分で測定が可能となっている。現在ではさらに進化版としてLC60D では75000点/秒でデータを取り込み測定時間の短縮に努めている。
三角測量
三角測量のもう一つの形式を考える。下の記事を参考にしている。
http://annex.jsap.or.jp/OSJ/kogaku/vol36/pdf/36_9/542-543.pdf
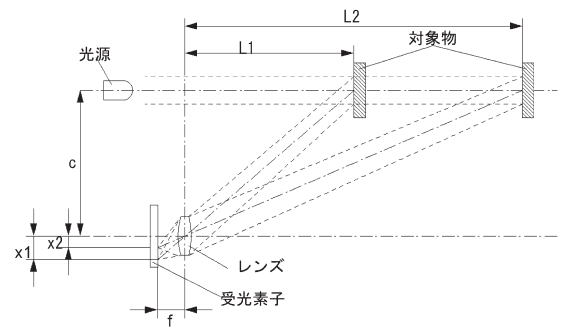
一般的な三角測量の測定原理を考える。
センサーは光を照射する光源と、対象物からの散乱光を結像するレンズと結像した光を
電気信号に変換する受光素子によって構成されている。
図に示したように、レンズによって受光素子上に結像されつ結像位置は
対象物の散乱光を受光素子に結像するレンズの間でなす三角形の相似関係から以下の式が得られる。
xが分かれば、f、cはわかっているので、測定物までの距離Lが得られる。
センサ設計に関して考える。検出距離と分解能はスポット位置xの微小変動分⊿x、検出距離Lの微小変動分
を⊿Lとすると、上式を微分することで、
が得られる。この式からわかることはLが大きいとスポットの変動量が小さくなるので検出が難しくなる。